
Helping Hand
Published:
Hardware used
Logitech camera
Dynamixel AX-12A Servos
About the project
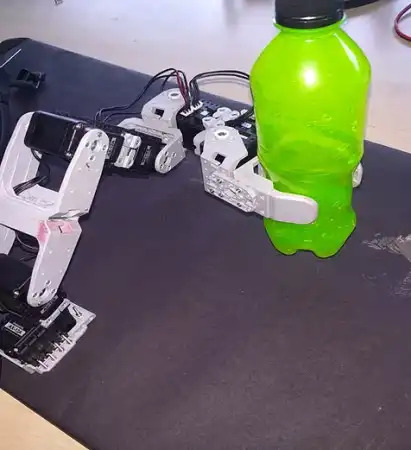
With the goal of developing assistive technology for the severely disabled, we, at SRM Team Humanoid, developed a 6-DOF Robotic arm with an inverse kinematic controller. To enable users to control the same, a pupil tracking algorithm was developed using Computer Vision which is used to provide directional and motion commands to the hand. As a proof of concept, we used it to manipulate a bottle as shown in the image.
The pupil tracking was done using the following approach. The region of interest (ROI) is identified using a pre-trained Haar-Cascade Classifier for an eye. Then, grayscale thresholding is done on the ROI and Hough circles are used to identify the potential circles. If the number of circles is greater than two, the larger one is utilized as it will more accurately represent the center of the pupil.