Fire Detector
Published:
The aim of the project was to develop a Computer Vision algorithm to detect fire from video feed. This can be used in public places with surveillance cameras to monitor and notify any cases of fire breakout. 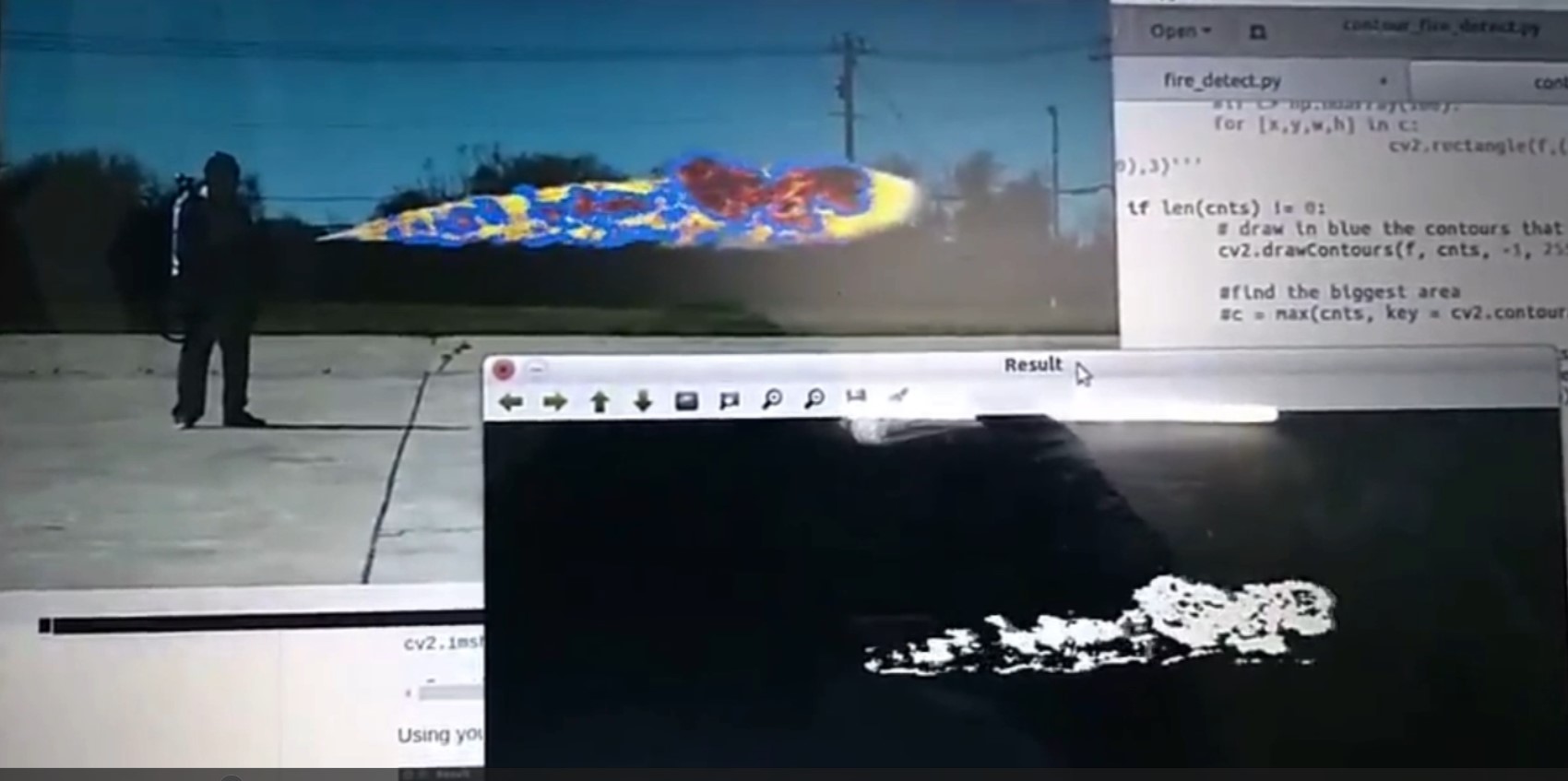

Published:
The aim of the project was to develop a Computer Vision algorithm to detect fire from video feed. This can be used in public places with surveillance cameras to monitor and notify any cases of fire breakout.
Published:
The goal of the project was to track an object of a specific color and aim to shoot it when it reaches a specific threshold. 
Published:
The project was made as an attempt to implement an assistive tech for people disabled neck down. Here, the direction of the eye is supposed to command the directional movement of a manipulator while the manipulator manipulates the object of interest. ![]()
Published:
The project aimed in building a robotic human upper body and give it the ability to be operated remotely. The operator movements are captured and fed as the input to the robot and the robot’s visual field was used as an input to the operator via VR. 
Published:
A humanoid chatbot capable of basic Voice and Text based interaction. 
Published:
Replica of Robotis OP3. 
Published:
Building on the upper body teleop project, an attempt to track the whole body was performed and the joint angles were replicated by the robot to shadow the operator. 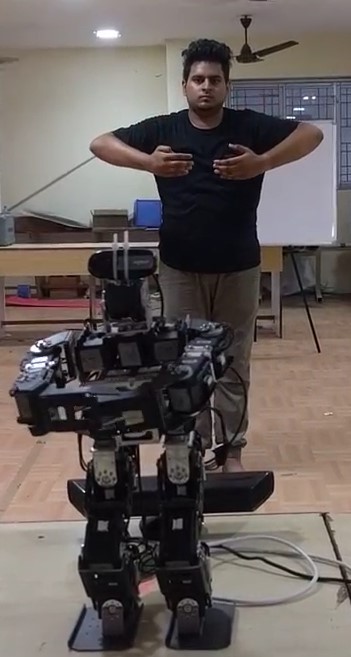
Published:
A portable corneal topographer to increase the accessibility of eyecare in rural areas. The objective was to develop a surface map of the cornea to map out the surface irregularities.
Published:
As an attempt to expose ourselves to manipulators during the job training module, we made an open-loop control 6DOF arm capable of screwing in fasteners. 
Published:
An Animatronic Hand that mimics hand gestures via remote actuation commands. Done during the NJIT Hardware Hackathon, Byte into Hardware. 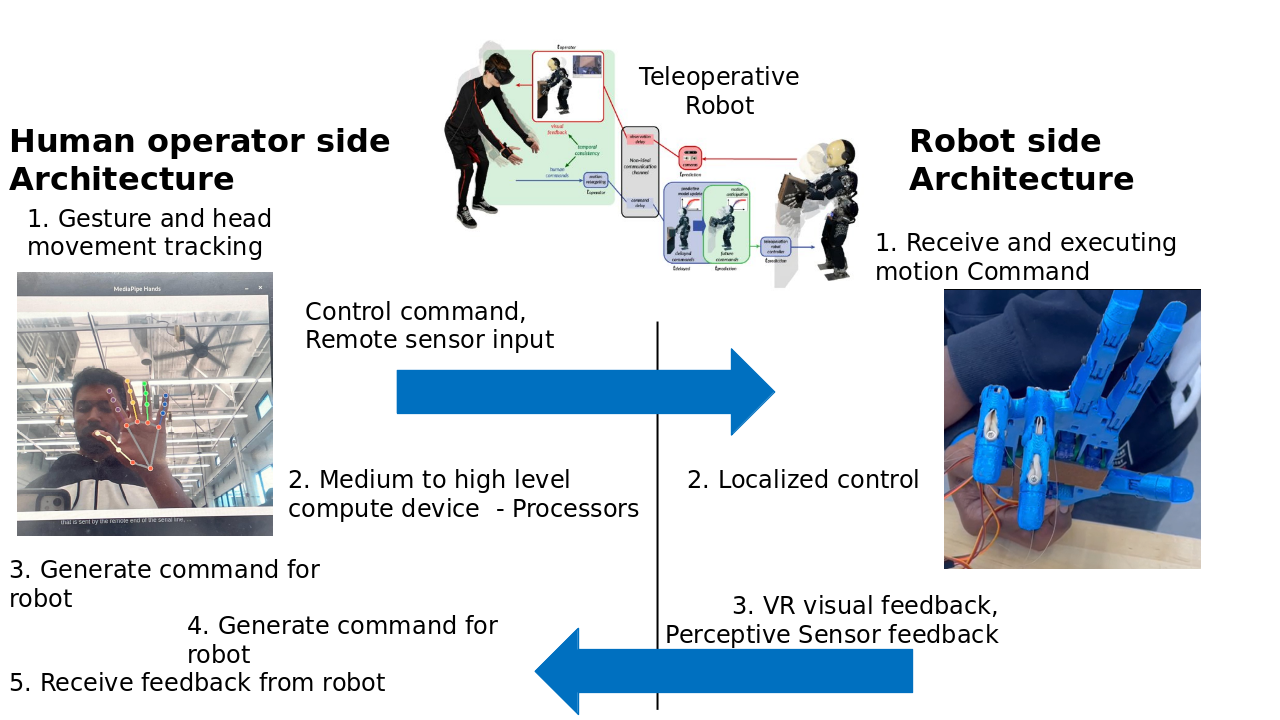
Published:
An Automated Ground Vehicle made to explore a pre-defined shopfloor layout with dynamic obstacles and locate widgets and navigate to its end position indicating the POC of transporting the widget. 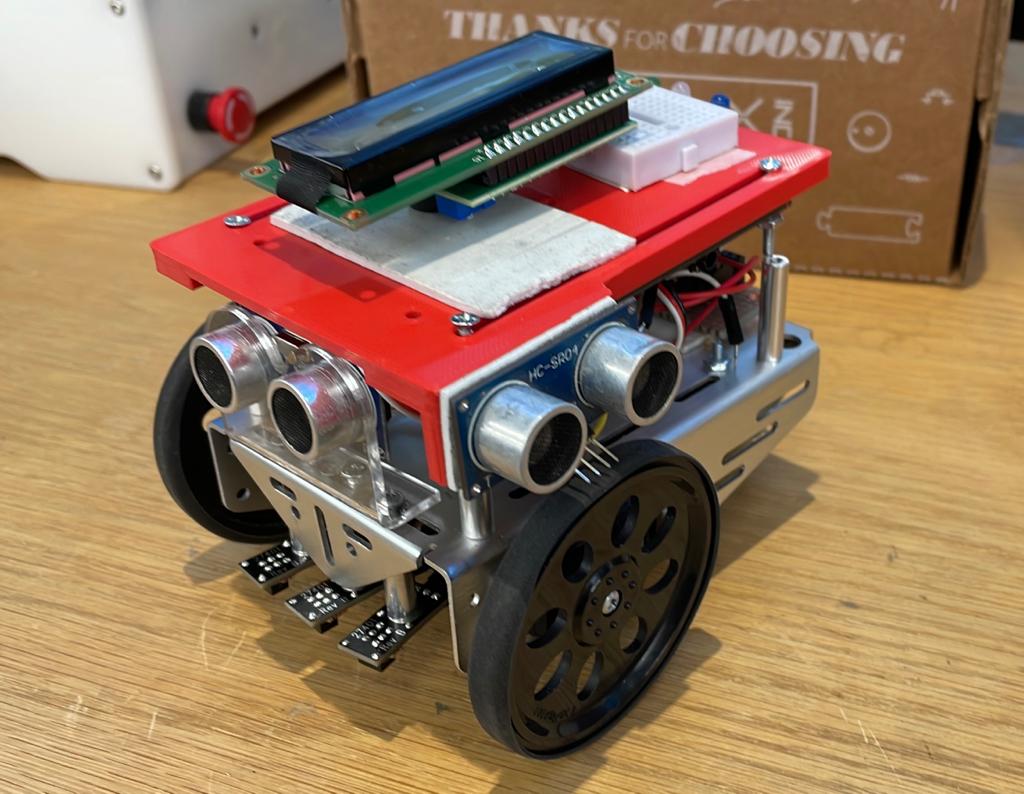
Published:
A challenge to navigate to a specific pose represented by First Person View (FPV) on all four directions of the agent with just the current FPV as the input. 
Published in SRM Team Humanoid, 2016
Designed a reactive control for a Humanoid using a PID controller for the ankle motors to increase robot stability.
Published in SRM Team Humanoid, 2017
An inverse kinematic-based algorithm to generate a smooth walkcycle.
Published in 21st International Conference on Intelligent Transportation Systems (ITSC), 2018
A look back at different motion planning approaches taken while navigating an intersection.
Recommended citation: S. Krishnan, R. Govind Aadithya, R. Ramakrishnan, V. Arvindh and K. Sivanathan, "A Look at Motion Planning for AVs at an Intersection," 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 2018, pp. 333-340, doi: 10.1109/ITSC.2018.8569244. https://ieeexplore.ieee.org/document/8569244
Published in 4th International Symposium On Robotics and Manufacturing Automation, DSEC, Perambalur, Tamil Nadu, India., 2018
A decentralized trajectory planning approach while optimizing for minizing jerk. The approach proposes a safe region formulation that takes into account the static and dynamic obstacles while trajectory optimization.
Recommended citation: Arvindh, Vijay, Govind Aadithya R, and Shravan Krishnan. "Collision-Free Multi Robot Trajectory Optimization in Unknown Environments using Decentralized Trajectory Planning." arXiv e-prints (2018): arXiv-1812. https://arxiv.org/pdf/1812.00868.pdf
Published in IP, India, 2019
A multi robot system capable of decentralized navigation without collisions with static or dynamic obstacles with the help of onboard sensor and other robot states.
Download here
Published in ArXiv, 2019
Building on the Collision-Free Multi Robot Trajectory Optimization in Unknown Environments using Decentralized Trajectory Planning work, we extended the framework to account for the interactions like the downwash of the robot, size of the robot, and explicit dynamic collision avoidance with soft constraints while solving for trajectory.
Recommended citation: Krishnan, S., Rajagopalan, G. A., Kandhasamy, S., & Shanmugavel, M. (2019). Towards Scalable Continuous-Time Trajectory Optimization for Multi-Robot Navigation. https://arxiv.org/pdf/1910.13463.pdf
Published in Advances in Control and Optimization of Dynamic Systems 2020, IIT Madras, India, 2020
Continuing the work from Collision-Free Multi Robot Trajectory Optimization in Unknown Environments using Decentralized Trajectory Planning, in this paper we propose a trajectory optimization framework where we estimate the trajectories of the other robotis as a polynomial function of time hence accounting for tentative collision zones that should be avoided by the ego while planning the trajectory.
Recommended citation: Shravan Krishnan, Govind Aadithya Rajagopalan, Sivanathan Kandhasamy, Madhavan Shanmugavel, "Continuous-Time Trajectory Optimization for Decentralized Multi-Robot Navigation", IFAC-PapersOnLine,Volume 53, Issue 1,2020,Pages 494-499,ISSN 2405-8963. https://doi.org/10.1016/j.ifacol.2020.06.083
Published in Proquest, 2024
The work focuses on development and validation of a simulation platform for Robotis OP3 robot with MuJoCo.
Recommended citation: Rajagopalan, Govind Aadithya. New York University Tandon School of Engineering ProQuest Dissertations & Theses, 2024. 31297576 https://www.proquest.com/docview/3055611107
Published:
This is a description of your talk, which is a markdown files that can be all markdown-ified like any other post. Yay markdown!
Published:
This is a description of your conference proceedings talk, note the different field in type. You can put anything in this field.
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.